Bostan, A., & Schost, É. (2005). Polynomial evaluation and interpolation on special sets of points. Journal of Complexity, 21(4), 420-446. の内容と、FFT で計算したときの計算量のメモ
2023/12/13: 計算量の定数倍を一部訂正(改善)しました
| Question | General | Arithmetic | Geometric |
|---|---|---|---|
| Newton → Monomial | 自然な分割統治 | General と同じ | q-二項定理で展開すると q-exp |
| Monomial → Newton | noshi91のメモ | General と同じ | q-exp の逆元 |
| Monomial evaluation | hly1204's blog | General と同じ。Newton 基底経由でも可 | ア辞典 |
| Monomial interpolation | ei1333の日記 | 微分の多点評価を |
ア辞典, Newton 基底経由でも可 |
| Newton evaluation | Monomial 基底を経由 | 式変形すると exp | 式変形すると q-exp |
| Newton interpolation | Monomial 基底を経由 | exp の逆元 | q-exp の逆元 |
- 支配的でない項は書かない。
- 長さ
冪
の DFT が
で計算できるとする。
になっている部分は、
が
冪だとして定数倍を評価している
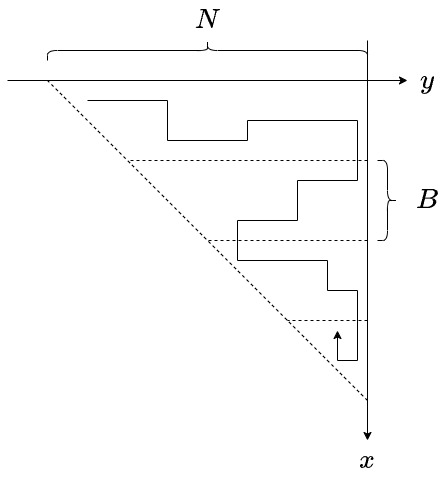
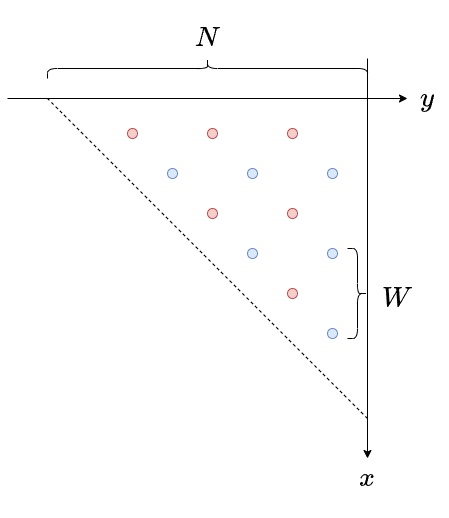
- subproduct tree の計算は
| Question | General | Arithmetic | Geometric |
|---|---|---|---|
| Newton → Monomial | |||
| Monomial → Newton | |||
| Monomial evaluation | |||
| Monomial interpolation | |||
| Newton evaluation | |||
| Newton interpolation |